Flow Renderer¶
Flow has a customized renderer built on pyglet. It provides a convenient interface for image-based learning. It supports rendering the simulation as a top-view snapshot and can extract local observations of RL vehicles or tracked human vehicles.
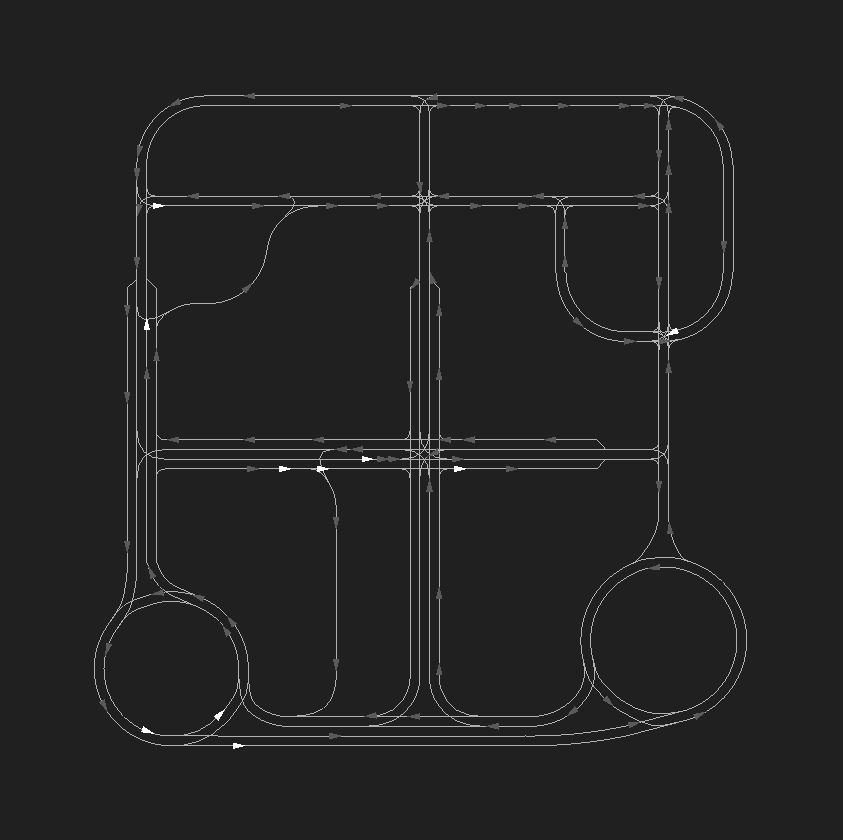
An example of the minicity rendered by the pyglet renderer can found below.

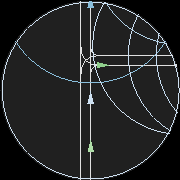
The green arrows are untracked human vehicles, while the blue arrows are RL vehicles and tracked human vehicles. Color saturation is proportional to speed. For example, the greener the human vehicles, the faster they are driving. The observation radius of RL and tracked human vehicles are marked by circles.
An example of an extracted local observation is as follows.
To generate the rendering seen above, use
exp = minicity_example(render='drgb', # Render in dynamic RGB colors
save_render=False, # Disable saving
sight_radius=30, # Radius of obs.
pxpm=3, # Render at 3 pixel per meter
show_radius=True) # Show obs. radius
To render in grayscale without observation circles, which is usually desired for learning, use
exp = minicity_example(render='gray', # Render in grayscale
save_render=False, # Disable saving
sight_radius=30, # Radius of obs.
pxpm=3, # Render at 3 pixel per meter
show_radius=False) # Hide obs. radius
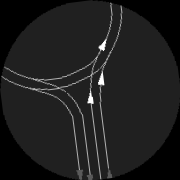
An example of a frame rendered in grayscale without circles is as follows.
An extracted location observation is presented below.
To save the rendering, set save_render=True. The rendered frames and local
observations will be saved at ~/flow_rendering.
Finally, to compile the rendered frames into a video, install ffmpeg and run
ffmpeg -i "~/flow_rendering/path_to/frame_%06d.png" -pix_fmt yuv420p -vf "pad=ceil(iw/2)*2:ceil(ih/2)*2" replay.mp4
For more information, check the PygletRenderer class.
The custom renderer is slower than SUMO’s built-in GUI. We are working on performance optimization and will update a faster version in near future.